Sensors are tools for humans to perceive, obtain, and detect various kinds of information in nature. Through them, a large amount of information that cannot be obtained by human senses can be acquired. In modern science and technology, industrial and agricultural production, and daily human life, sensors play an irreplaceable role. It can be said that the more developed the science and technology and the higher the degree of automation, the greater the dependence on sensors.
I. Composition and Classification of Sensors
1) Composition of Sensors
Sensors are usually composed of a sensitive element, a conversion element, and a basic conversion circuit, as shown in Figure 1.
The sensitive element is a component that can sensitively sense the measured quantity and respond according to a determined relationship.
The conversion element is a component that converts the measured quantity sensed by the sensitive element into circuit parameters (such as resistance, inductance, and capacitance) or electrical quantities (such as voltage and current).
The basic conversion circuit is a circuit that converts the output of the conversion element into an electrical quantity that is convenient for transmission and processing.

Figure 1 Composition of Sensors
Some sensors can be composed of only a sensitive element and a conversion element, and for some sensors, the sensitive element and the conversion element can be combined into one. The simplest sensor is composed of a sensitive element (which also serves as a conversion element), and it can directly output an electrical quantity when sensing the measured quantity, such as a thermocouple, a piezoelectric crystal, a photovoltaic cell, etc.
2) Classification of Sensors
There are a wide variety of sensors, and there are also many classification methods for them. Here, only two of the most commonly used classification methods are introduced.
(1) Classification according to the measured physical quantity. There are displacement sensors, proximity sensors, velocity sensors, temperature sensors, force sensors, torque sensors, pressure sensors, and acceleration sensors, etc. This classification method directly indicates the purpose of the sensor, corresponding to the types of various measured information that users and sensor manufacturers care about, making it convenient for users to understand and select sensors.
(2) Classification according to the working principle. There are resistive sensors, capacitive sensors, inductive sensors, piezoelectric sensors, Hall sensors, photoelectric sensors, etc. This classification method is based on the working principle of the sensor, which is beneficial for people to understand and study various sensors and their detection principles.
3) Basic Characteristics of Sensors
The characteristics of a sensor refer to the corresponding relationship between the output quantity and the input quantity of the sensor. Since the input quantity has two basic forms: static (i.e., the input signal is in a basically stable state that does not change with time or changes very slowly) and dynamic (i.e., the input signal is in a changing state that changes periodically with time or changes irregularly and instantaneously), the characteristics of the sensor usually have two corresponding representation forms, namely static characteristics and dynamic characteristics.
When the input quantity is in a static state, the relationship between the output and the input quantity of the sensor is called the static characteristic of the sensor. Usually, the main indicators used to characterize the static characteristics of the sensor are: measurement range, span, sensitivity, resolution, linearity, hysteresis, repeatability, drift, and stability, etc.
II. Characteristics of Commonly Used Sensors
(1) Proximity Sensors
Proximity sensors can detect whether the measured object is approaching without contact and output the detection result in the form of a switch signal. Therefore, they are usually also called contactless travel switches or proximity switches.
There are many types of proximity switches, such as inductive, capacitive, photoelectric, and Hall types.
(1) Inductive Proximity Sensors. Inductive proximity sensors are also called inductive proximity switches or eddy current proximity switches. The inductive proximity switch is mainly composed of an LC high-frequency oscillation circuit, a signal processing circuit, and a switch amplifier circuit, as shown in Figure 2.
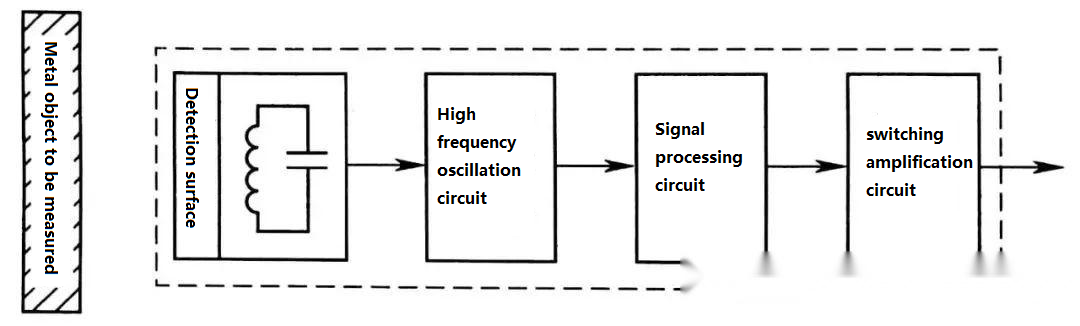
Figure 2 Schematic Diagram of Inductive Sensor
(2) Capacitive Proximity Sensors.
Capacitive proximity sensors are also called capacitive proximity switches, and their circuit block diagram is shown in Figure 3.
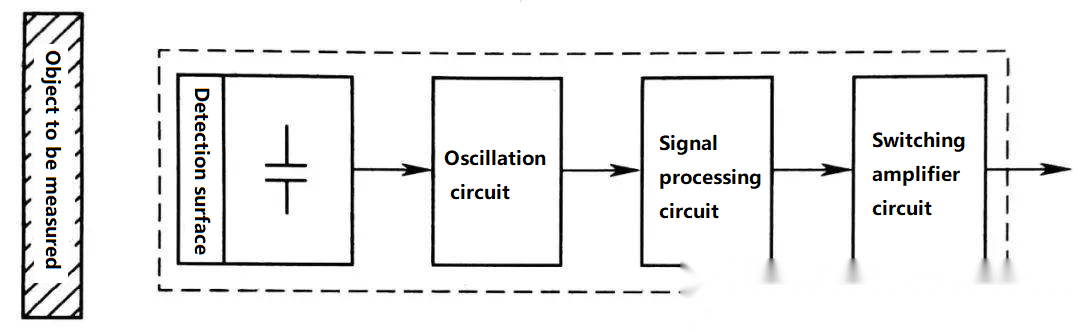
Figure 3 Schematic Diagram of Capacitive Sensor
The capacitive proximity switch uses the plates of the capacitor as its detection surface, and the substance facing the outside of the detection surface is the insulating medium between the two plates of the capacitor. If the insulating medium changes, the capacitance of the capacitor will also change accordingly.
Whether the measured object is a metal or a non-metal, when it approaches or leaves the capacitive proximity switch, it will cause the dielectric constant of the capacitor of the proximity switch to change, so that the capacitive proximity switch can output a corresponding switch signal.
Therefore, the objects detected by the capacitive proximity switch are not limited to metal conductors, but can also be insulating liquids or powdery objects. The used capacitive proximity switch is shown in Figure 4.

Figure 4 Capacitive Proximity Sensor
(3) Photoelectric Proximity Sensors.
Photoelectric sensors are a type of sensor that uses optoelectronic devices to convert optical signals into electrical signals. Its core sensitive element is an optoelectronic device, and the working basis of the optoelectronic device is the photoelectric effect.
(4)Temperature Sensors
In order to meet the temperature measurement requirements of different occasions and different substances, there are two methods for measuring temperature: contact and non-contact. The former is to directly make physical contact between the temperature-sensing element and the measured object and measure the temperature through heat conduction; the latter is to measure the temperature by heat transfer through thermal radiation without making physical contact between the temperature-sensing element and the measured object.
For the two temperature measurement methods, there are corresponding temperature sensors. Contact temperature sensors usually use the temperature characteristics of materials or components to measure the temperature. Commonly used temperature sensors mainly include thermocouples, thermal resistors, thermistors, and integrated temperature sensors, etc. Figure 5 shows the temperature sensor Pt100 and temperature transmitter used in the equipment.

Figure 5 Temperature Sensor
(5) Magnetic Switches
In automated production lines, magnetic switches are used for the position detection of various cylinders. Two magnetic switches are used to measure the positions where the cylinders on the manipulator extend and retract in place.
The magnetic proximity switch (referred to as the magnetic switch for short) is a non-contact position detection switch. This non-contact position detection will not wear or damage the detected object and has a high response speed.
The magnetic switch is used to detect the presence of magnetic substances. In terms of installation methods, there are wire lead-out types, connector types, and connector relay types. According to the requirements of the installation site environment, the magnetic switch can be selected as a shielded type or an unshielded type. Its appearance is shown in Figure 6.

Figure 6 Magnetic Switch
(6) Fiber Optic Photoelectric Proximity Switches
The fiber optic photoelectric proximity switch (referred to as the fiber optic photoelectric switch for short) is also a type of fiber optic sensor. The sensing part of the fiber optic sensor has no electrical connection, does not generate heat, and only uses a small amount of light energy. These characteristics make the fiber optic sensor an ideal choice in dangerous environments.
The fiber optic sensor can also be used for long-term, highly reliable and stable monitoring of key production equipment. Compared with traditional sensors, the fiber optic sensor has the following advantages: resistance to electromagnetic interference, ability to work in harsh environments, long transmission distance, long service life. In addition, due to the small volume of the fiber optic head, it can be installed in a very small space. The fiber optic amplifier is set according to the need.
For example, in some production processes, sparks, electric sparks, etc. may cause explosions and fires. Since light energy will not be a source of ignition, it will not cause explosions and fires. The fiber optic detection head can be set in a dangerous place, and the amplifier unit can be set in a non-dangerous place for use.
The fiber optic sensor is composed of two parts: the fiber optic detection head and the fiber optic amplifier. The fiber optic amplifier and the fiber optic detection head are two separate parts. Structurally, fiber optic sensors are divided into two categories: sensing type and light-transmitting type. The sensing type uses the optical fiber itself as a sensitive element, enabling the optical fiber to have the functions of sensing and transmitting the measured information.
The light-transmitting type inputs the optical signal modulated by the measured object into the optical fiber and measures it by processing the optical signal at the output end. The working principle of the light-transmitting fiber optic sensor is similar to that of the photoelectric sensor. In the goods sorting unit in production, the light-transmitting fiber optic photoelectric switch is used, and the optical fiber is only used as the transmission line for the modulated light.
(7) Photoelectric Encoders
The photoelectric encoder is a sensor that converts mechanical and geometric displacement quantities into pulses or digital quantities through photoelectric conversion. It is mainly used for the detection of speed or position (angle).
A typical photoelectric encoder is composed of a code disk (Disk), a detection grating (Mask), a photoelectric conversion circuit (including a light source, a photosensitive device, and a signal conversion circuit), and mechanical components, etc.
Generally speaking, according to the different ways of generating pulses by the photoelectric encoder, it can be divided into three categories: incremental type, absolute type, and composite type. The incremental sensor is often used on the production line, and its structure is shown in Figure 7.
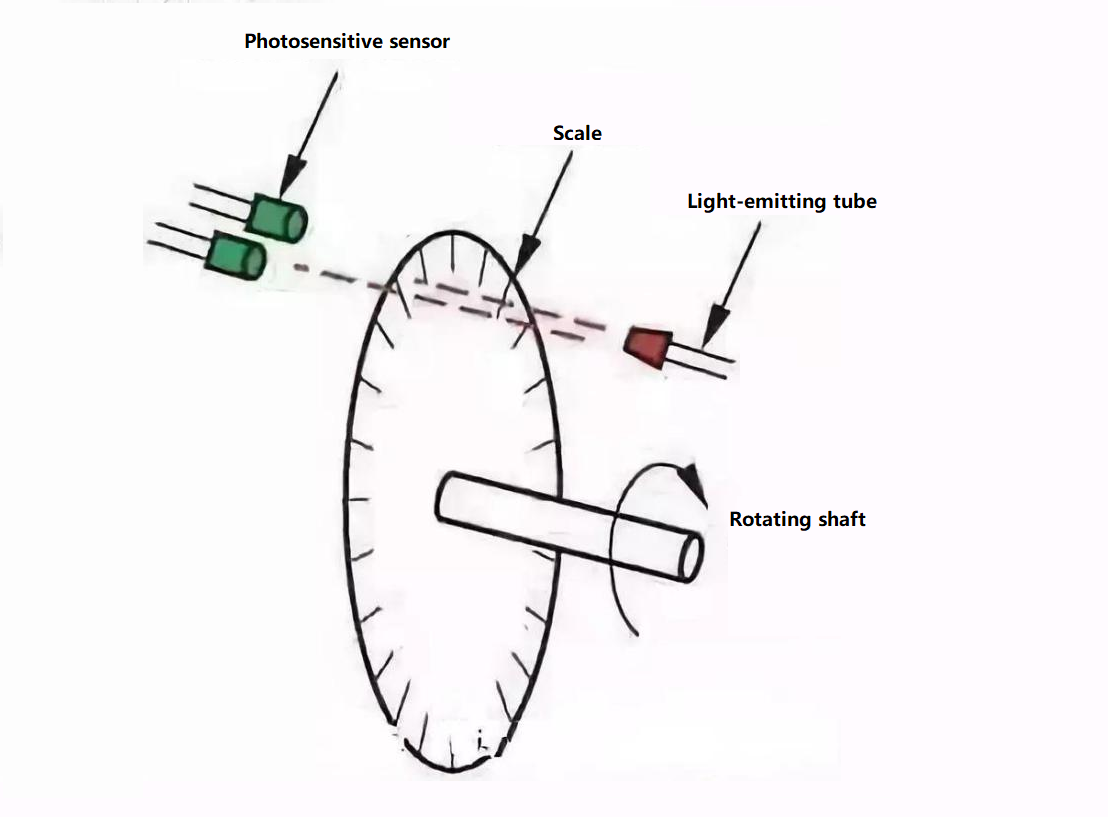
Figure 7 Schematic Diagram of Photoelectric Encoder
The positioning control of the conveyor belt on general production equipment is completed by the photoelectric encoder. At the same time, the photoelectric encoder also needs to measure the speed of the motor.
(8) Force Sensors
A force sensor is a device that converts the magnitude of a force into a related electrical signal. Force is the direct cause of the movement and change of matter. The force sensor can detect mechanical quantities such as tension, pulling force, pressure, weight, torque, internal stress, and strain. Specific devices include metal strain gauges, pressure sensors, etc., which have become indispensable core components in power equipment, construction machinery, various machine tools, and industrial automation systems.
The force sensor is mainly composed of three parts:
1---The force-sensitive element (i.e., the elastic body, common materials include aluminum alloy, alloy steel, and stainless steel).
2---The conversion element (the most common one is the resistance strain gauge).
3---The circuit part (generally including enameled wire, PCB board, etc.).
As shown in Figure 8.

Figure 8 Force Sensors
(9) Slot-Type Photoelectric Switches
The slot-type photoelectric sensor is composed of a light emitter and a receiver installed face to face on both sides of a slot to form a slot-type photoelectric device. The light emitter can emit infrared light or visible light, and the light receiver can receive the light in the absence of obstruction. However, when the detected object passes through the slot, the light is blocked, and the photoelectric switch acts, outputting a switch control signal to cut off or turn on the load current, thus completing a control action. The detection distance of the slot-type switch is generally only a few centimeters due to the limitation of the overall structure.
The Structural Principle of the Slot-Type Sensor
The main structure of the current slot-type sensor is divided into three parts, namely the emitter, the receiver, and the detection circuit. Its complete working cycle is that the emitter emits visible light or invisible infrared light towards the target, and the receiver performs different operations according to whether it receives the light signal. For example, when the receiver cannot receive the light signal, the slot-type sensor will complete a control action by outputting a switch control signal. In practical application scenarios, whenever the detected object passes through the control slot of the slot-type sensor, the object blocking the light will prompt the slot-type sensor to complete the effective control of the signal. Its appearance is shown in Figure 9.

Figure 9 Slot-Type Sensor
(10) Laser Sensor
The Working Principle of the Laser Sensor
When the laser sensor works, it first emits a laser pulse towards the target through the laser emitting diode. After the laser reaches the target, it scatters in all directions through reflection. A part of the scattered light is received by the sensor receiver and imaged onto the photodiode through the optical system. The photodiode is actually an optical sensor with an internal amplification function, which can detect very weak light signals and convert the light signals into corresponding electrical signals. The laser ranging sensor is a common ranging sensor among laser sensors. It can determine the target distance by recording and processing the round-trip time of the light pulse. However, due to the extremely fast speed of light, the laser sensor must determine the transmission time very accurately.
Although the principle of laser ranging is very simple and the structure of the laser sensor is not complex. In the past, laser ranging sensors were mainly used in military and scientific research fields, and there were very few application examples in the field of industrial automation. This is because laser ranging sensors are expensive, and the price of an ordinary laser ranging sensor is around several thousand dollars. As shown in Figure 10.

Figure 10 Laser Sensor
III. Selection of Sensors
To carry out a specific measurement task, the first thing to consider is which principle of the sensor to adopt, which can only be determined after analyzing various factors. Because even for measuring the same physical quantity, there are multiple types of sensors based on different principles available for selection. To determine which principle of the sensor is more suitable, the following specific issues need to be considered according to the characteristics of the measured quantity and the usage conditions of the sensor: the size of the measurement range; the requirements of the measured position for the volume of the sensor; whether the measurement method is contact or non-contact; the method of signal extraction, whether it is wired or non-contact measurement; the source of the sensor, whether it is domestic or imported, whether the price is affordable, or whether it needs to be developed independently. After considering the above issues, the type of sensor to be selected can be determined, and then the specific performance indicators of the sensor can be considered.
Selection of Sensitivity:
Generally, within the linear range of the sensor, it is desirable to have a higher sensitivity of the sensor. Because only when the sensitivity is high, the value of the output signal corresponding to the change of the measured quantity is relatively large, which is beneficial for signal processing. However, it should be noted that if the sensitivity of the sensor is high, external noise unrelated to the measured quantity is also likely to be mixed in and will also be amplified by the amplification system, affecting the measurement accuracy. Therefore, the sensor itself is required to have a higher signal-to-noise ratio and minimize the interference signals introduced from the outside. The sensitivity of the sensor has a directionality. When the measured quantity is a single vector and has a high requirement for its directionality, a sensor with low sensitivity in other directions should be selected; if the measured quantity is a multi-dimensional vector, the smaller the cross-sensitivity of the sensor, the better.
Frequency Response Characteristics:
The frequency response characteristics of the sensor determine the frequency range of the measured quantity, and it must remain distortion-free within the allowable frequency range. In fact, there is always a certain delay in the response of the sensor, and it is desirable to have a shorter delay time. The higher the frequency response of the sensor, the wider the measurable signal frequency range. In dynamic measurement, the response characteristics should be selected according to the characteristics of the signal (steady state, transient state, random, etc.) to avoid excessive errors.
Linear Range:
The linear range of the sensor refers to the range where the output is proportional to the input. Theoretically, within this range, the sensitivity remains constant. The wider the linear range of the sensor, the larger its measurement range, and a certain measurement accuracy can be ensured. When selecting a sensor, after the type of the sensor is determined, the first thing to check is whether its measurement range meets the requirements. In fact, however, no sensor can guarantee absolute linearity, and its linearity is also relative. When the required measurement accuracy is relatively low, within a certain range, a sensor with a small nonlinear error can be approximately regarded as linear, which will bring great convenience to the measurement.
Stability:
The ability of a sensor to maintain its performance unchanged after being used for a period of time is called stability. In addition to the structure of the sensor itself, the main factor affecting the long-term stability of the sensor is the usage environment of the sensor. Therefore, to make the sensor have good stability, the sensor must have strong environmental adaptability. Before selecting a sensor, an investigation should be carried out on its usage environment, and an appropriate sensor should be selected according to the specific usage environment, or appropriate measures should be taken to reduce the impact of the environment. The stability of the sensor has quantitative indicators. After the expiration of the service life, it should be recalibrated before use to determine whether the performance of the sensor has changed. In some occasions where the sensor is required to be used for a long time and cannot be easily replaced or calibrated, the stability requirement of the selected sensor is more stringent, and it should be able to withstand the test of a long time.
Accuracy:
Accuracy is an important performance indicator of the sensor, and it is an important link related to the measurement accuracy of the entire measurement system. The higher the accuracy of the sensor, the more expensive it is. Therefore, the accuracy of the sensor only needs to meet the accuracy requirements of the entire measurement system, and there is no need to select a sensor with too high accuracy. In this way, among the many sensors that meet the same measurement purpose, a relatively cheap and simple sensor can be selected. Atlas Copco air compressor parts. If the measurement purpose is for qualitative analysis, a sensor with high repeatability accuracy can be selected, and a sensor with high absolute value accuracy is not suitable; if it is for quantitative analysis and an accurate measurement value must be obtained, a sensor with an accuracy level that can meet the requirements should be selected. For some special usage occasions where a suitable sensor cannot be selected, it is necessary to design and manufacture the sensor independently. The performance of the self-made sensor should meet the usage requirements.
Through the comprehensive analysis of the core knowledge of various sensors and the selection methods in this article, it is hoped that readers can not only master the basic concepts but also understand the adaptation logic in actual scenarios. If necessary, you can contact our product engineers to help you select the appropriate sensor product.



